|
6-Les codes de programmation :
Le codage et la compilation sont réalisés grâce à l'IDE d'arduino. https://www.arduino.cc/ Il est divisé en plusieurs parties.
.Le programme principale et le setup. Les commentaires sont en anglais, parfois un peu approximatifs ;-).
/***********************************************************************
<Accelerometer connected. This a accelerometer for ride machines it work itself to record data in a data base>
Copyright (C) <2019> <Fabrice BAUDIN>
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <https://www.gnu.org/licenses/>.
Cette adresse e-mail est protégée contre les robots spammeurs. Vous devez activer le JavaScript pour la visualiser.
****************************************************************************************/
/* library system*/
#include <Wire.h>
#include <FS.h>
#include <EEPROM.h>
#include <ESP8266WiFi.h>
#include <ESP8266WebServer.h>
#include <ESP8266mDNS.h>
#include <ESP8266HTTPUpdateServer.h>
/* to enable sleep mode */
extern "C" {
#include "user_interface.h"
}
/* define registrer of MPU 6050 */
#define MPU6050_RA_XG_OFFS_TC 0x00 //[7] PWR_MODE, [6:1] XG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN
#define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN
#define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN
#define MPU6050_ADDR 0x68 //68 Adress of the MPU
#define MPU6050_SMPLRT_DIV 0x19 // Sample divider 1 Khz/1+this number here to have 20 Hhz
#define MPU6050_CONFIG 0x1a // Config filter pass down
#define MPU6050_GYRO_CONFIG 0x1b // Configure gyroscope
#define MPU6050_ACCEL_CONFIG 0x1c // Configure accelerometer
#define MPU6050_WHO_AM_I 0x75 // Information on the device
#define MPU6050_PWR_MGMT_1 0x6b // Sleep or wake up management
#define MPU6050_PWR_MGMT_2 0x6c // Sleep or wake up management
#define MPU6050_TEMP_H 0x41 // Registrers of temperature
#define MPU6050_TEMP_L 0x42
#define MPU6050_FIFO_EN 0x23 // Enable Fifo registrer
#define MPU6050_INT_PIN_CFG 0x37 // Configure the interrupt pin
#define MPU6050_INT_ENABLE 0x38 // Enable interrupt
#define MPU6050_INT_STATUS 0x3A // Staut flags occure by interrupt
#define MPU6050_USER_CTRL 0x6A // User control enable fifo...
#define MPU6050_FIFO_COUNT_H 0x72 // count the bytes in the FIFO registrers
#define MPU6050_FIFO_COUNT_L 0x73
#define MPU6050_FIFO_R_W 0x74 // Read or Write in the FIFO registrers
#define MPU6050_MOT_DETECT_CTRL 0x69 // Delay detection motion
#define MPU6050_RA_FF_THR 0x1D // fall_Thresold
#define MPU6050_RA_FF_DUR 0x1E // Fall_DURATION
#define MPU6050_RA_MOT_THR 0x1F // Motion Thresold
#define MPU6050_RA_MOT_DUR 0x20 // Motion Duration
#define MPU6050_RA_ZRMOT_THR 0x21 // Zero Thesold
#define MPU6050_RA_ZRMOT_DUR 0x22 // Zero Duration
#define MPU6050_RA_INT_STATUS 0x3A // Read to clear interrupt
#define MPU6050_SIGNAL_PATH_RESET 0x68 // Reset Path
#define MPU6050_ACONFIG_ACCEL_HPF_BIT 2
#define MPU6050_ACONFIG_ACCEL_HPF_LENGTH 3
/* Memory page*/
#define OFFSET_X_MEM 0 //value adjustement of X
#define GAIN_X_MEM 4
#define OFFSET_Y_MEM 8 //Value adjust of Y
#define GAIN_Y_MEM 12
#define OFFSET_Z_MEM 16 // Value adjust of Z
#define GAIN_Z_MEM 20
#define OFFSET_T_MEM 24 // Value adjust of température
#define POSITION_MEM 28 // Vertical or horizontal position
#define MEM_SSID 32 // SSID of connection 30 max
#define MEM_PASSWORD 65 // pass word access
#define ADRESS_SERVER 200 //
#define PORT_SERVER 116
#define NAME_MODULE 120
#define MEM_TIME_SLEEP 150 //time out time sleep after wake up *///
#define MEM_CALIBRATION 155 // Date of the last calibration
#define SAMPLE_MEM 170 //period to get samples
#define DURATION_RIDE_MEM 172 // Duration maximum for a ride (in seconds)
#define LOW_PASS_MEM 174 // Filter low pass
/* wifi variables */
ESP8266WebServer httpServer(80);
char ip_httpServer[15]; // adress ip of the module
int unsigned port_httpServer=80; // port of httpServer
String ssid=""; // ssid
String password=""; // Password
String local_mac; // adress mac of the module
String local_ip; // adress ip of module
int power_mode=0; // 0: mode normale; 1: mode portail wifi; 2: mise en route paramettrage possible, 4: sleep mode demand
unsigned long delay_reboot=0; // delay during the page of connection is open before reboot
#define DELAY_REBOOT 300000 // time during the portail is open befor reset,cpu don't go in sleep mode during this time
String ref_module="coaster_accelerometer"; // référence du module
String version_module="V1"; // version of module
char name_module[20]; // name of module
/* config update server */
//const char* host = "esp8266-webupdate";
const char* update_path = "/firmware";
const char* update_username = "admin";
const char* update_password = "admin";
ESP8266HTTPUpdateServer httpUpdater;
/* Use to control software */
long timer = 0; // Timer
byte flag = 0; // flag statut
int i=0; // index
byte file_number=1; // Number of file open
#define TIME_SLEEP_MODE 30000 // Define the time before to go to sleep
unsigned long time_wake_up; // mesure time before to go in sleep mode
/*use to mesure the time between two samples */
unsigned long periode=0;
unsigned long lasttime=0;
/* accelerometer variable */
int16_t rawAccX, rawAccY, rawAccZ, rawTemp; // value read befor conversion
float temp, accX, accY, accZ; // currently value
float max_x, max_y, max_z; // maximum found for a ride
float min_x, min_y, min_z; // minimum found for a ride
byte sample; // period of simple 4 or 8 ms (125 Hz or 250 Hz)
byte hex_sample; // convert sample for MPU5060
byte low_pass; // filter 5 or 10 Hz
byte hex_low_pass; // convert filter for MPU5060
unsigned int duration_ride; // max time in seconds for one ride maximum 300 secondes
int data; //read data from accelerometer
unsigned long time_ride; // time of the last ride in milliseconds
unsigned long max_sample_ride; // Number of samples that it can be recorders
int false_sample=0;
/* variable for calibration adjuste= aX + b */
int activation=0; // equal 1 when the calibration in underway
int step_calibration=0; // Step of calibration 8 steps
int step_format=0; // Step use to format memory and return informations on the web page
float first_dot; // First dot mesure for the calibration
float second_dot; // Second dot use to make calibration
byte error_position; // Bad position of the accelerometer for the calibration
byte verticale_position=0; // Use position
float gain_x; // Gain correction
float offset_x; // Offset correction
float gain_y; // Gain correction
float offset_y; // Offset correction
float gain_z; // Gain correction
float offset_z; // Offser correction
String date_calibration; // Date of the last calibration
float offset_temp; // Value of adjustement
int number_samples=0; // numbers of sample
/* Value to adjust start or stop ride */
#define START_DELAY 500 // Delay in ms before to validate start signal
#define STOP_DELAY 3000 // Delay in ms to validate the stop of the ride
#define END_RIDE_TIME 0 // Delay avaible to stop the ride in ms
unsigned long start_delay; // Mesure the delay to wait start
unsigned long stop_delay; // Mesure the delay to wait stop
unsigned long end_ride_sample;
int run_ride=0; // 0: ride stop, 1: tempory signal to run ride, 2: the ride run, 3: Tempory signal for stop
/* Spiff file datas */
File f;
/**************************************************************
* Set up system *
***************************************************************/
void setup() {
system_update_cpu_freq(160);
WiFi.setPhyMode(WIFI_PHY_MODE_11G);
pinMode(D5, OUTPUT);
digitalWrite(D5,LOW);
delay(100);
//system_phy_set_powerup_option(0);
/* Start Wire communication */
Wire.begin(D1,D2);
Wire.flush(); // empty serial buffer
Serial.begin(115200); // set serial port
Serial.flush();
Serial.println("");
Serial.println F ("Start setup");
Serial.println F ("Start I2C Communication ");
/*EEPPROM setup */
EEPROM.begin(512); // allocations de 512 adresses Mémoires
Serial.println F ("Read EEPROM");
byte mem[4]; // Array to read men
long rsave; // long to read save
byte test_mem[2]; // to read men
/* Samples and low filter configuration */
sample= EEPROM.read (SAMPLE_MEM); // Read period of sample
if(sample==4){hex_sample=0x03;} // 250 Hz
else{hex_sample=0x07;} // 125 Hz
end_ride_sample=END_RIDE_TIME/sample;
Serial.print F ("the period sample is: "); Serial.print(sample); Serial.println F (" ms");
low_pass= EEPROM.read (LOW_PASS_MEM); // Read value of filter
if(low_pass==10){hex_low_pass=0x05;} // 10 Hz
else{hex_low_pass=0x06;} // 5 Hz
Serial.print F ("the low filter is : "); Serial.print(low_pass); Serial.println F (" Hz");
/* Duration of one ride */
for (int a=0;a<3;a++){test_mem[a]= EEPROM.read(DURATION_RIDE_MEM+a);} // Read the time max of a ride
duration_ride= test_mem[0]|test_mem[1]<<8; // in seconds
max_sample_ride=(duration_ride*1000)/sample; // Convert in number of samples
Serial.print F ("The max time ride is : "); Serial.print(duration_ride); Serial.println F (" s");
/* offset and gain to adjust mesurement */
for (int a=0;a<4;a++){mem[a]= EEPROM.read (OFFSET_X_MEM+a);}
rsave=(long)mem[0]|(long)mem[1]<<8|(long)mem[2]<<16|(long)mem[3]<<24;
offset_x= float(rsave)/1000;
if (fabs(offset_x)>0.5){offset_x=0;}
Serial.print F ("The x off_set adjust is : "); Serial.println(offset_x);
for (int a=0;a<4;a++){mem[a]= EEPROM.read (GAIN_X_MEM+a);}
rsave=(long)mem[0]|(long)mem[1]<<8|(long)mem[2]<<16|(long)mem[3]<<24;
gain_x= float(rsave)/1000;
if (fabs(gain_x)>1.2||fabs(gain_z)<0.8){gain_x=1;}
Serial.print F ("The x gain adjust is : "); Serial.println(gain_x);
for (int a=0;a<4;a++){mem[a]= EEPROM.read (OFFSET_Y_MEM+a);}
rsave=(long)mem[0]|(long)mem[1]<<8|(long)mem[2]<<16|(long)mem[3]<<24;
offset_y= float(rsave)/1000;
if (abs(offset_y)>0.5){offset_y=0;}
Serial.print F ("The y off_set adjust is : "); Serial.println(offset_y);
for (int a=0;a<4;a++){mem[a]= EEPROM.read (GAIN_Y_MEM+a);}
rsave=(long)mem[0]|(long)mem[1]<<8|(long)mem[2]<<16|(long)mem[3]<<24;
gain_y= float(rsave)/1000;
if (abs(gain_y)>1.2||fabs(gain_y)<0.8){gain_y=1;}
Serial.print F ("The y gain adjust is : "); Serial.println(gain_y);
for (int a=0;a<4;a++){mem[a]= EEPROM.read (OFFSET_Z_MEM+a);}
rsave=(long)mem[0]|(long)mem[1]<<8|(long)mem[2]<<16|(long)mem[3]<<24;
offset_z= float(rsave)/1000;
if (fabs(offset_z)>0.5){offset_z=0;}
Serial.print F ("The z off_set adjust is : "); Serial.println(offset_z);
for (int a=0;a<4;a++){mem[a]= EEPROM.read (GAIN_Z_MEM+a);}
rsave=(long)mem[0]|(long)mem[1]<<8|(long)mem[2]<<16|(long)mem[3]<<24;
gain_z= float(rsave)/1000;
if (fabs(gain_z)>1.2||fabs(gain_z)<0.8){gain_z=1;}
Serial.print F ("The z gain adjust is : "); Serial.println(gain_z);
/* Date of the last calibration */
char carac='1';
int a=0;
while (!(carac=='\0')&&a<100){carac=char (EEPROM.read(MEM_CALIBRATION+a));if (!(carac=='\0')){date_calibration +=carac;} a++;}
if (date_calibration=='\0'||a>50){date_calibration=F("1901-00-00");}
Serial.print F ("Date of the last calibration: ");Serial.println(date_calibration);
/* Position of work Vertical or Horizontal */
verticale_position= EEPROM.read (POSITION_MEM); // Position of work
if(verticale_position>1){verticale_position=0;}
Serial.print F ("Work position: ");Serial.println(verticale_position);
/* offset of temperature */
for (int a=0;a<4;a++){mem[a]= EEPROM.read (OFFSET_T_MEM+a);} // oofset temp
rsave=(long)mem[0]|(long)mem[1]<<8|(long)mem[2]<<16|(long)mem[3]<<24;
offset_temp= float(rsave)/100;
if (fabs(offset_temp)>10){offset_temp=0;}
Serial.print F ("Offset temperatur: ");Serial.println(offset_temp);
/* Read ip adress httpServer */
String reception="";
reception.reserve(30);
carac='1';
a=0;
while (!(carac=='\0')&&a<20){carac=char (EEPROM.read(ADRESS_SERVER+a));reception+= carac; a++;}
if (reception=='\0'||a==20){reception=F("InnoGreenTech");}
int c = reception.length() + 1;
reception.toCharArray(ip_httpServer, c);
Serial.print F ("The IP Server is : ");Serial.println(ip_httpServer);
/* Name of the module */
reception="";
carac='1';
a=0;
while (!(carac=='\0')&&a<20){carac=char (EEPROM.read(NAME_MODULE+a));reception+= carac; a++;}
if (reception=='\0'||a==20){reception=F("InnoGreenTech");}
c = reception.length() + 1; // longueur de la chaîne de caractéres
reception.toCharArray(name_module, c);
Serial.print F ("Name modul is : ");Serial.println(name_module);
/* SSID connection */
carac='1';
a=0;
while (!(carac=='\0')&&a<100){carac=char (EEPROM.read(MEM_SSID+a));if (!(carac=='\0')){ssid +=carac;} a++;} //récupération du lien d'information
if (ssid=='\0'||a>50){ssid=F("");}
Serial.print F ("SSID : ");Serial.println(ssid);
/* Password */
carac='1';
a=0;
while (!(carac=='\0')&&a<100){carac=char (EEPROM.read(MEM_PASSWORD+a));if (!(carac=='\0')){password +=carac;} a++;} //récupération du lien d'information
if (password=='\0'||a>50){password=F("");}
Serial.print F ("Password : ");Serial.println("****");
/* Port httpServer */
for (int a=0;a<3;a++){test_mem[a]= EEPROM.read(PORT_SERVER+a);} // load the port httpServer
port_httpServer= test_mem[0]|test_mem[1]<<8;
Serial.print F ("Server port is : ");Serial.println(port_httpServer);
/*wifi configuration */
WiFi.mode(WIFI_STA); // switch on Wifi
c =ssid.length()+1; // convert ssid in chart variable
char char_ssid[30];
ssid.toCharArray(char_ssid, c);
c =password.length()+1; // convert password in chart
char char_password[30];
password.toCharArray(char_password, c);
WiFi.begin(char_ssid,char_password); //Connect to wifi router
local_mac=WiFi.macAddress(); // Convert mac adress
delay(10000); // Delay for waiting connection
/* sleelp mode of wemos */
wifi_fpm_set_sleep_type(LIGHT_SLEEP_T); // set the sleep mode of 8266
/* Portal for configur WIFI connection
If wifi is not connected, open the webpage to change configuration */
if ( WiFi.status()!= WL_CONNECTED)
{
WiFi.disconnect();
WiFi.mode(WIFI_AP);
power_mode=1;
Serial.println(F("Page of configuration portal open"));
delay(200);
WiFi.softAP("InnoGreenTech", "innogreentech");
httpServer.on ( "/index.html", handleRoot ); // go to set up wifi page
delay(100);
}
/* Open wifi httpServer for configure probe */
else{
//MDNS.begin(host);
httpUpdater.setup(&httpServer, update_path, update_username, update_password);
power_mode=2;
local_ip=WiFi.localIP().toString().c_str();
Serial.println("");
Serial.print F("IP address: "); Serial.println (local_ip);
Serial.println(F("Server to configur wamp or calibration page are open"));
httpServer.on ( "/add_module.csv", add_module ); //Page to add or modify module by php httpServer
httpServer.on ( "/calibration.html", calibration ); //Page to calibratre accelerometer
httpServer.on ( "/format.html",format); //Page to format spiffs memory
delay(100);
}
/* Start File management sytem detect if file exist else format spiffs memory*/
SPIFFS.begin();
Serial.print F("Mac adress: ");Serial.println(local_mac);
Serial.println F ("Start Spiffs memory");
f=SPIFFS.open("/datas.txt", "w");
f.close();
Serial.println F ("Version 22/02/2019");
/*Prepare accelerometer*/
pinMode(D6, INPUT_PULLUP); // Configur interrupt input
pinMode(D7, INPUT_PULLUP); // Configur interrupt input
beginMPU6050(); // Sart configuration of accelerometer
Serial.println F ("Accelerometer is ready");
/* set initial datas */
delay_reboot=millis(); //init delay
httpServer.begin(); //start httpServer web
time_wake_up=millis(); //init delay
flag=4; // avaible get samples
writeMPU6050(MPU6050_INT_ENABLE, 0x40); //Set interrupt on motion détection*/
delay(500);
}
/*************************************************************
* Main program *
*************************************************************/
void loop() {
/* read Value of battery if it is to low enter in sleep mode
float raw = analogRead(A0);
float volt = map(raw, 274, 949, 0, 420); // Avec une résistance 1M5 - With a 1M5 resistor
volt = volt / 100;
if (volt<3.4)
{
writeMPU6050(MPU6050_INT_ENABLE, 0x00); //disable interupt on the MPU 6050
readMPU6050(MPU6050_INT_STATUS); //Clear interupt on MPU6050
power_mode=4;
}
//Serial.print("A0 "); Serial.println(raw);
//Serial.print("Voltage "); Serial.println(volt);
/* active accelerometer if at the beginning there is a motion detection else stay in server mode */
if(flag==4){ //reset false interrupt
while (digitalRead(D6)==0){
//Serial.println(F("interrupt is hight"));
readbyteMPU6050(MPU6050_INT_STATUS); // Reset interrupt on mpu5060
delay(20);}
flag=6;
}
if(flag==6&&digitalRead(D6)==0) // Control motion and close page if it hapen
{
Serial.println(F("Movement detect"));
httpServer.stop();
delay(1000);
WiFi.setPhyMode(WIFI_PHY_MODE_11N);
wifi_station_disconnect(); //disable wifi modem for safe power
wifi_set_opmode(NULL_MODE);
power_mode=0; //entry in mode mesurement
flag=3;
}
/*After wake up open file to recorder enter to mesurement mode*/
if(power_mode==5)
{
writeMPU6050(MPU6050_INT_ENABLE, 0x00);
power_mode=0;
}
/* order to go in sleep mode */
if (power_mode==4){
delay(10);
goto_sleep();
}
/* Mode for open page configution portal wifi */
if(power_mode==1)
{
httpServer.handleClient();
if (millis()-delay_reboot>DELAY_REBOOT){system_restart(); }
}
/* Page for configure probe on the httpServer or firmware page */
if(power_mode==2)
{
httpServer.handleClient();
if (millis()-delay_reboot>DELAY_REBOOT){httpServer.stop();power_mode==4;} // close httpServer and put cpu in sleep mode
}
/* Set mode to do mesurements */
if(flag==3)
{
writeMPU6050(MPU6050_INT_ENABLE, 0x00); //disable interupt on the MPU 6050
readbyteMPU6050(MPU6050_INT_STATUS); //Clear interupt on MPU6050
time_wake_up=millis(); //Start time out
writeMPU6050(MPU6050_USER_CTRL,0x44); //reset buffer
delay(10);
//writeMPU6050(MPU6050_USER_CTRL,0xC4);
flag=1; //Start measurement
}
/* Control ride run, if it does not run, stay the cpu in sleep mode */
if(power_mode==0) {
if((millis()-time_wake_up>TIME_SLEEP_MODE&&run_ride==0))
{
power_mode=4;
}
}
/* Datas ready to be read */
if(flag==1)
{
readMPU6050(MPU6050_FIFO_COUNT_H); // Update the number of datas in the buffer
if(data>5){
Serial.print(data);Serial.print("*");
updateFifoMPU6050();
/* Conditions start ride and stop ride */
if(((accX>0.5)&&(accZ<0.8))&&(run_ride<2)&&(activation==0)){ // start signal
if (run_ride==0){start_delay=millis();run_ride=1;}
else if (millis()-start_delay>START_DELAY)
{
f=SPIFFS.open("/datas.txt", "a");
run_ride=2;
Serial.println F("Start ride");
lasttime= millis();
}
}
else if (run_ride==1){run_ride=0;} // If signal is not confirm, end of start ride
if(((accX<-0.6)&&(accZ<0.8))&&((run_ride==2)||(run_ride==3))&&(end_ride_sample<number_samples)){ // stop signal
if (run_ride==2){stop_delay=millis();run_ride=3;}
else if (millis()-stop_delay>STOP_DELAY)
{
periode= millis()-lasttime;run_ride=4;
Serial.println F("End of ride"); // Use to control the period of time, debug tool
Serial.print(periode);Serial.println("ms/"); f.close();}
}
else if (run_ride==3){run_ride=2;} // If signal is not confirm, continu mesure
if (number_samples>max_sample_ride){run_ride=4; Serial.println F("Out time, stop ride"); f.close();}
/*record datas in file currently open*/
if((run_ride==2)||(run_ride==3)) {
String datas= String(accX,3)+";"+String(accY,3)+";"+String(accZ,3)+"%";
f.print(datas);
//Serial.println(datas);
if(max_x<accX){max_x=accX;}
if(max_y<accY){max_y=accY;}
if(max_z<accZ){max_z=accZ;}
if(min_x>accX){min_x=accX;}
if(min_y>accY){min_y=accY;}
if(min_z>accZ){min_z=accZ;}
i++;
number_samples++;
}
else if (run_ride==4) {
//writeMPU6050(MPU6050_PWR_MGMT_1, 0x40); // pause cycle/sleep
//ETS_GPIO_INTR_DISABLE(); // disable interrupt mode
i=0;
run_ride=0;
//delay(5000); // delay to wait the and of brake
updateTempMPU6050();
send_data(); // send data before goto spleep after
number_samples=0;
power_mode=4; // Send spleep mode
flag=0;
}
}
}
}
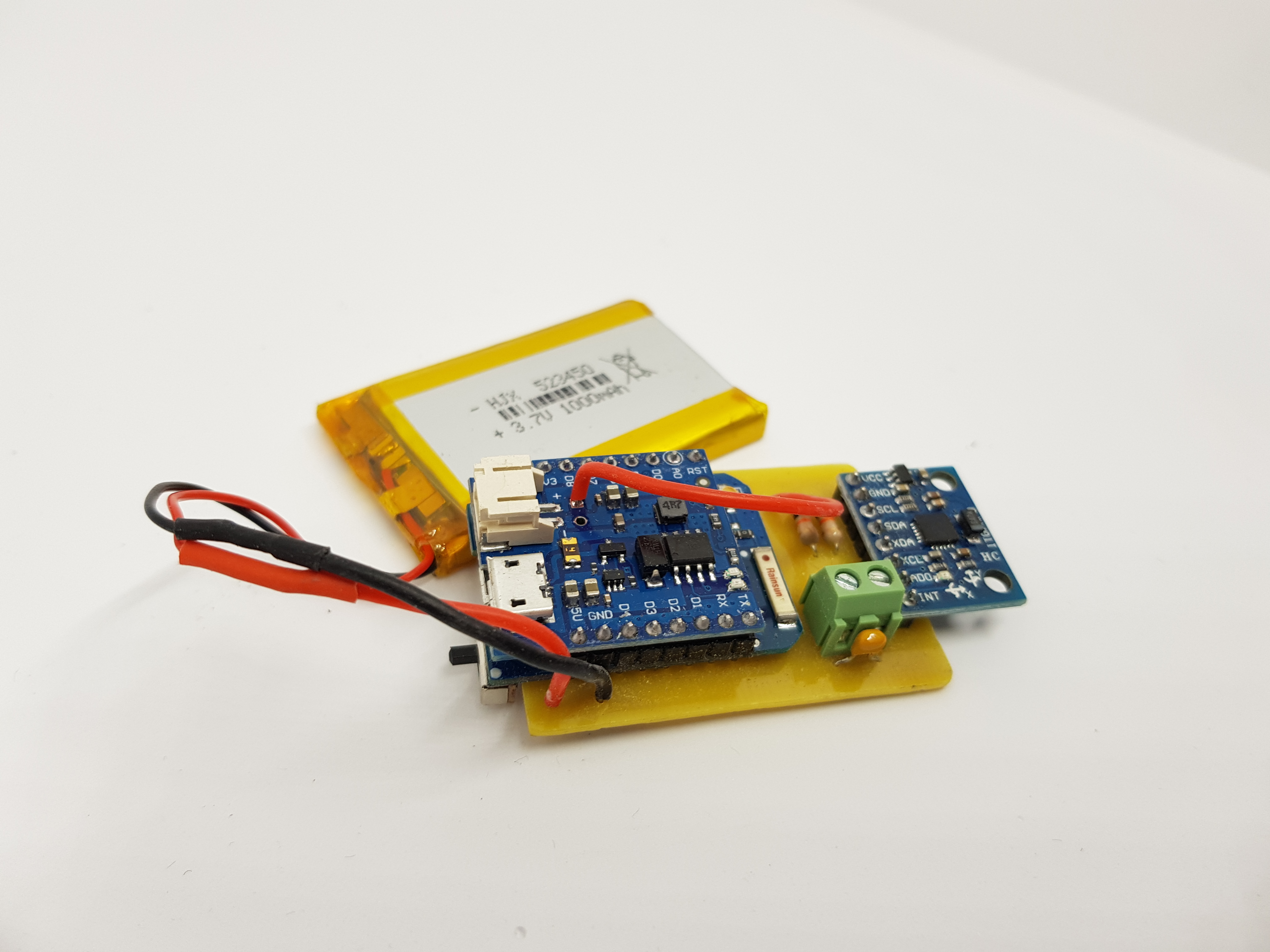
Le suivant gère la mise en route et la lecture de l'accéléromètre.
l'alimentation de l'accéléromètre est connectée sur la sortie D5. Cela permet de mieux gérer son initialisation.
/* Set configuration of the MPU6050 */
void beginMPU6050(void){
Wire.flush();
digitalWrite(D5,LOW);
delay(1000);
digitalWrite(D5,HIGH);
delay(500);
writeMPU6050(MPU6050_PWR_MGMT_1, 0x01); // Start MPU
delay(100);
writeMPU6050(MPU6050_SIGNAL_PATH_RESET, 0x07); // Reset registrer of measurement
writeMPU6050(MPU6050_PWR_MGMT_1, 0x81); // Reset MCU
delay(500);
digitalWrite(D5,LOW);
delay(1000);
digitalWrite(D5,HIGH);
delay(500);
writeMPU6050(MPU6050_PWR_MGMT_1, 0x01); // Start MPU
delay(100);
writeMPU6050(MPU6050_USER_CTRL,0x80); // Active dmp
delay(500);
digitalWrite(D5,LOW);
delay(1000);
digitalWrite(D5,HIGH);
delay(500);
writeMPU6050(MPU6050_PWR_MGMT_1, 0x00); // Start MPU
delay(100);
writeMPU6050(MPU6050_USER_CTRL,0x44); // Active And reset Buffer FIFO
writeMPU6050(MPU6050_FIFO_EN, 0x08); // Activate FIFO Buffer acc
writeMPU6050(MPU6050_RA_MOT_THR,0x04); // Threehold motion x2mgx F/7
writeMPU6050(MPU6050_RA_MOT_DUR,0x2F); // duration motion motion ms 1F
writeMPU6050(MPU6050_PWR_MGMT_2, 0x07); // Gyroscope into standby mode
writeMPU6050(MPU6050_CONFIG, hex_low_pass); // 06 Configure for low pass filter at 5 Herzts, requier by Norm
writeMPU6050(MPU6050_SMPLRT_DIV, hex_sample); // 0x07 for 8 ms Sample divider 1 Khz/1+ this number here to 100 hz59)-200(4)
writeMPU6050(MPU6050_ACCEL_CONFIG, 0x11); // Set +- 8g ET Digital hight pass
writeMPU6050(MPU6050_INT_PIN_CFG,0xE0); // OxE0 behavior Interrupt pin open drain interrupt low level
//writeMPU6050(MPU6050_INT_ENABLE, 0x40); //Set interrupt on motion détection*/
delay(200);
}
/* Write datas in MP5060 */
void writeMPU6050(byte reg, byte data){
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(reg);
Wire.write(data);
Wire.endTransmission(true);
}
/* Read one registrer */
byte readbyteMPU6050(byte reg) {
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(reg);
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_ADDR, 1,(int)true);
byte result = Wire.read();
return result;
}
/* Read datas */
int readMPU6050(byte reg) {
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(reg);
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_ADDR, 2,(int)true); // wemos
data = Wire.read()<<8 | Wire.read();
return data;
}
/*Acces to memory FIFO */
void updateFifoMPU6050(){
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x74); //0x74Wire.read() << 8 | Wire.read();
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_ADDR, 6,(int)true); // wemos
rawAccX = Wire.read() << 8 | Wire.read();
rawAccY = Wire.read() << 8 | Wire.read();
rawAccZ = Wire.read() << 8 | Wire.read();
accX = ((float)rawAccX) / 4096.0; // Scale for =- 8G
accY = ((float)rawAccY) / 4096.0;
accZ = ((float)rawAccZ) / 4096.0;
/* if calibration is not underway */
if (activation!=1){
if (verticale_position==0){
accX = accX*gain_x+offset_x;
accY = accY*gain_y+offset_y;
accZ = accZ*gain_z+offset_z;}
else{
float temporaire=accZ*gain_z+offset_z;
accZ=accX*gain_x+offset_x;
accX=-temp;
accY = accY*gain_y+offset_y;
accZ=temporaire;
}
}
}
/* Direct Acces to registrer */
void updateDatasMPU6050(){
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_ADDR, 6,(int)true); // wemos
rawAccX = Wire.read() << 8 | Wire.read();
rawAccY = Wire.read() << 8 | Wire.read();
rawAccZ = Wire.read() << 8 | Wire.read();
accX = ((float)rawAccX) / 4096.0; // Scale for =- 8G
accY = ((float)rawAccY) / 4096.0;
accZ = ((float)rawAccZ) / 4096.0;
/* if calibration is not underway */
if (activation!=1){
if (verticale_position==0){
accX = accX*gain_x+offset_x;
accY = accY*gain_y+offset_y;
accZ = accZ*gain_z+offset_z;}
else{
float temporaire=accZ*gain_z+offset_z;
accZ=accX*gain_x+offset_x;
accX=-temp;
accY = accY*gain_y+offset_y;
accZ=temporaire;
}
}
}
void updateTempMPU6050(){
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_ADDR, 2,(int)true); // wemos
rawTemp = Wire.read() << 8 | Wire.read();
temp = ((float)rawTemp/ 340.0)+35; //temp = ((float)rawTemp + 12412.0) / 340.0;
if(activation!=1){temp= temp+offset_temp;}
}
Cette partie permet de récupérer les informations du serveur de données.
Il permet aussi à l'accéléromètre de s'identifier au prés du serveur.
/* Use to configure communication with wamp server and create data base for this */
void add_module(void){
String reception;
if ( httpServer.hasArg("ip_server") )
{
reception=httpServer.arg("ip_server");
int c = reception.length() + 1; // lenght of string
if ( c>15){ Serial.println(F("adresse ip invalide")); return;}
Serial.println(reception);
reception.toCharArray(ip_httpServer, c);
for (int i = 0; i < c; i++) {
EEPROM.write((i+ADRESS_SERVER),reception[i]); // save adresse IP in EEPROM
}
}
if ( httpServer.hasArg("port") )
{
reception = httpServer.arg("port");
Serial.println(reception);
port_httpServer=reception.toInt();
int b=port_httpServer;
for (int a=0;a<2;a++){EEPROM.write(PORT_SERVER+a ,b);b=b>>8;} // Save configuration port
}
if ( httpServer.hasArg("name") )
{
reception=httpServer.arg("name");
int c = reception.length() + 1;
if ( c>20){Serial.println(F("Nom trop long"));return;}
Serial.println(reception);
reception.toCharArray(name_module, c);
for (int i = 0; i < c; i++) {
EEPROM.write((i+NAME_MODULE),reception[i]); // save adresse IP in EEPROM
}
}
if ( httpServer.hasArg("period") ) // Period to send datas
{
reception = httpServer.arg("period");
Serial.println(reception);
}
EEPROM.commit(); // Make the recorder
httpServer.send ( 200, "text/csv", answer_add_module() ); // Send web page
}
/* Creat file csv with information for the php httpServer */
String answer_add_module()
{
String page =name_module; page +=F(";"); page +=ref_module; page +=F(";"); page +=local_mac; page +=F(";");
page +=local_ip; page +=F(";"); page +=version_module; page +=F("\r\n"); // line 1 informations module
page +=F("coaster_accelerometer;a1;coaster_accelerometer;MPU5060\r\n"); // line 2 informations accelerometer
return page;
}
Ici le programme qui envoie l'enregistrement à la fin d'un ride. Remarquez que le wifi n'est activé qu'à ce moment.
/* send datas at the datas base */
void send_data(void) {
/* Restart Wifi connection */
wifi_set_opmode(STATION_MODE); //WIFI_AP
wifi_station_connect();
Serial.println F ("Start connection to wifi station");
//delay(3000); // Waiting connection to Wifi
while (wifi_station_get_connect_status() != STATION_CONNECTING){}
time_ride= sample*number_samples; //calculate the time of ride
f=SPIFFS.open("/datas.txt", "r+"); //open file in read mode
unsigned long lenght_string=f.size();
Serial.print F ("The lenght of the message is : ");Serial.print(lenght_string); Serial.println F (" Bytes");
unsigned long time_out_connection= millis();
while (WiFi.status()!= WL_CONNECTED)
{
if (millis()-time_out_connection>10000)
{
Serial.println F ("connection Wifi fail ! Datas have not been send");
goto fin_connection;
}
delay(100);
Serial.print('-');
}
if( WiFi.status()== WL_CONNECTED){
Serial.println();
Serial.println F ("Connection Wifi success!");
String ligne1=("data=a1;"+local_mac+";"+local_ip+";"+temp+";"+sample+";"+time_ride+";"+max_x+";"+max_y+";"+max_z+";"+min_x+";"+min_y+";"+min_z+";"+date_calibration+";"+low_pass+"%");
long size_message= lenght_string + ligne1.length();
WiFiClient client;
if (client.connect(ip_httpServer,port_httpServer))
//if (client.connect("www.innogreentech.fr",port_httpServer))
{
Serial.println F ("Connection to server success, send datas");
delay(100);
client.print ("POST");
client.println (" /InnoGreenTech/controller/csv_accelerometer.php HTTP/1.1");
client.print ("Host:");
client.println (ip_httpServer);
client.println ("Connection: Close");
client.println ("Content-Type: application/x-www-form-urlencoded");
client.print ("Content-Length: ");
client.println (size_message);
client.print ("\r\n");
client.print(ligne1);
//Serial.println(ligne1);
/* send file*/
for(int a=0; a<lenght_string; a=a+500){
int limit=lenght_string-a;
if (limit>500){limit=500;}
char char_datas[501];
char_datas[500]=0;
for (int index=0; index<500; index++){
char_datas[index]=(char)f.read();
}
client.print(char_datas);
//Serial.println(char_datas);
}
/*delay(1000);
client.flush();
client.stop();*/
// wait for data to be available
unsigned long timeout = millis();
while (client.available() == 0) {
if (millis() - timeout > 5000) {
Serial.println(">>> Client Timeout !");
goto fin;
}
}
// Read all the lines of the reply from server and print them to Serial
Serial.println("receiving from remote server");
// not testing 'client.connected()' since we do not need to send data here
while (client.available()) {
char ch = static_cast(client.read());
Serial.print(ch);
}
// Close the connection
fin:
Serial.println();
Serial.println("closing connection");
client.flush();
client.stop();
Serial.println F ("Success ! Datas have been sent");
}
else{Serial.println F ("Connection to httpServer fail ! Datas have not been send");client.flush();client.stop();}
}
else{Serial.println F ("connection Wifi fail ! Datas have not been send");}
fin_connection:
number_samples=0;
max_x=0;
max_y=0;
max_z=0;
min_x=0;
min_y=0;
min_z=0;
SPIFFS.rename("/datas.txt", "/back.txt");
f.close();
delay(1000);
f=SPIFFS.open("/datas.txt", "w");
f.print("");
f.close();
time_wake_up=millis();
power_mode=0;
}
Gestion de la veille et du réveille de l'accéléromètre.
/* wake up after sleep mode*/
void fpm_wakup_cb_func1(void)
{
wifi_disable_gpio_wakeup();
wifi_fpm_close(); // disable force sleep function
uint32 gpio_status;
gpio_status = GPIO_REG_READ(GPIO_STATUS_ADDRESS);
GPIO_REG_WRITE(GPIO_STATUS_W1TC_ADDRESS, gpio_status);
Serial.println F ("Wake up");
flag=3;
power_mode=5;
}
/* entry in sleep mode */
void goto_sleep(void){
ETS_GPIO_INTR_DISABLE(); //Disable interupt gpio esp
//writeMPU6050(MPU6050_INT_ENABLE, 0x00); //disable interupt Mpu6050
//uint32 gpio_status;
//gpio_status = GPIO_REG_READ(GPIO_STATUS_ADDRESS);
//GPIO_REG_WRITE(GPIO_STATUS_W1TC_ADDRESS, gpio_status); //clear interrupt gpio
Serial.println ("");
Serial.println F ("Go to sleep");
writeMPU6050(MPU6050_USER_CTRL, 0x44); // FIFO RESET + enable DMP
writeMPU6050(MPU6050_INT_ENABLE, 0x40); // Enable move detection interrupt
//delay(5);
while (digitalRead(D6)==0){
readbyteMPU6050(MPU6050_INT_STATUS); // Clear interrupt on MP5060
delay(5);}
flag=0;
/*uint32 gpio_status;
gpio_status = GPIO_REG_READ(GPIO_STATUS_ADDRESS);
GPIO_REG_WRITE(GPIO_STATUS_W1TC_ADDRESS, gpio_status);*/
wifi_station_disconnect();
wifi_set_opmode(NULL_MODE); // set WiFi mode to null
delay(1000);
extern os_timer_t *timer_list; // close all timer
while (timer_list != 0){timer_list = timer_list->timer_next;}
Serial.flush(); // empty serial buffer
wifi_fpm_open();
//PIN_FUNC_SELECT(PERIPHS_IO_MUX_MTDI_U, FUNC_GPIO12);
wifi_enable_gpio_wakeup(D6, GPIO_PIN_INTR_LOLEVEL); // GPIO_PIN_INTR_LOLEVEL
wifi_fpm_set_wakeup_cb(fpm_wakup_cb_func1); // wake up fonction
wifi_fpm_do_sleep(0xFFFFFFF);
delay(2000);
}
/* vadation of interruption to record the samples (actually not use) */
void datas_memory(void)
{
ETS_GPIO_INTR_DISABLE();
flag=1;
/* clear interrupt statut */
uint32 gpio_status;
gpio_status = GPIO_REG_READ(GPIO_STATUS_ADDRESS);
GPIO_REG_WRITE(GPIO_STATUS_W1TC_ADDRESS, gpio_status);
ETS_GPIO_INTR_ENABLE();
readbyteMPU6050(MPU6050_INT_STATUS);
}
Portail pour la calibration et le réglage de l'accéléromètre.
/* use to set the accelerometer by customer */
void calibration(void){
String reception;
verticale_position=0;
time_wake_up=millis(); // reset time out
delay_reboot=millis(); // reset time out
if (activation==0){
flag=3;
activation=1;
writeMPU6050(MPU6050_SMPLRT_DIV, 0xC7); // Sample divider 1 Khz/1+ this number here to 5 hz for more disponibility of cpu
} // activate sample
if(httpServer.hasArg("Annulation"))
{
step_calibration=0;
activation=1;
}
/* z calibration */
if(step_calibration==0){
if ( httpServer.hasArg("Validate"))
{
gain_z=0;
offset_z=0;
if(accZ<0.8){step_calibration=0;error_position=1;} // If the accelerometer is not in the good position return the same page
else{ first_dot=accZ; error_position=0;}
}
}
if(step_calibration==1){
if ( httpServer.hasArg("Validate"))
{
if(accZ>-0.8){step_calibration=1;error_position=1;} // If the accelerometer is not in the good position return the same page
else{ second_dot=accZ;
error_position=0;
offset_z=((second_dot+first_dot)*-1)/(first_dot-second_dot);
gain_z=(1-offset_z)/first_dot;
}
}
}
/* y calibration */
if(step_calibration==2){
if ( httpServer.hasArg("Validate"))
{
gain_y=0;
offset_y=0;
if(accY<0.8){step_calibration=2;error_position=1;} // If the accelerometer is not in the good position return the same page
else{ first_dot=accY; error_position=0;}
}
}
if(step_calibration==3){
if ( httpServer.hasArg("Validate"))
{
//updateDatasMPU6050();
if(accY>-0.8){step_calibration=3;error_position=1;} // If the accelerometer is not in the good position return the same page
else{ second_dot=accY;
error_position=0;
offset_y=((second_dot+first_dot)*-1)/(first_dot-second_dot);;
gain_y=(1-offset_y)/first_dot;
}
}
}
/* x calibration */
if(step_calibration==4){
if ( httpServer.hasArg("Validate"))
{
gain_x=0;
offset_x=0;
if(accX<0.8){step_calibration=4;error_position=1;} // If the accelerometer is not in the good position return the same page
else{ first_dot=accX;error_position=0;}
}
}
if(step_calibration==5){
if ( httpServer.hasArg("Validate"))
{
//updateDatasMPU6050();
if(accX>-0.8){step_calibration=5;error_position=1;} // If the accelerometer is not in the good position return the same page
else{ second_dot=accX;
error_position=0;
offset_x=((second_dot+first_dot)*-1)/(first_dot-second_dot);
gain_x=(1-offset_x)/first_dot;
activation=2;
}
}
}
/* End of accelerometer calibration, wait validation */
if(step_calibration==6){
if ( httpServer.hasArg("date_calibration"))
{
date_calibration=httpServer.arg("date_calibration");
int c = date_calibration.length() + 1; // longueur de la chaîne de caractéres
for (int i = 0; i < c; i++) {
EEPROM.write((i+MEM_CALIBRATION),date_calibration[i]); // Réglage du pointeur sur l'adresse mémoire
}
long consigneLong=long(offset_x*1000);
Serial.println(consigneLong);
for (int a=0;a<4;a++){EEPROM.write(OFFSET_X_MEM+a ,consigneLong);consigneLong=consigneLong>>8;}
consigneLong=long(gain_x*1000);
Serial.println(consigneLong);
for (int a=0;a<4;a++){EEPROM.write(GAIN_X_MEM+a ,consigneLong);consigneLong=consigneLong>>8;}
consigneLong=long(offset_y*1000);
Serial.println(consigneLong);
for (int a=0;a<4;a++){EEPROM.write(OFFSET_Y_MEM+a ,consigneLong);consigneLong=consigneLong>>8;}
consigneLong=long(gain_y*1000);
Serial.println(consigneLong);
for (int a=0;a<4;a++){EEPROM.write(GAIN_Y_MEM+a ,consigneLong);consigneLong=consigneLong>>8;}
consigneLong=long(offset_z*1000);
Serial.println(consigneLong);
for (int a=0;a<4;a++){EEPROM.write(OFFSET_Z_MEM+a ,consigneLong);consigneLong=consigneLong>>8;}
consigneLong=long(gain_z*1000);
Serial.println(consigneLong);
for (int a=0;a<4;a++){EEPROM.write(GAIN_Z_MEM+a ,consigneLong);consigneLong=consigneLong>>8;}
EEPROM.commit();
step_calibration++;
}
}
/* Set temperrature,work position, filter, period samples and max time ride */
if(step_calibration==7){
/* record ofset temperature */
if (httpServer.hasArg("offset_temperature")){
reception=httpServer.arg("offset_temperature");
offset_temp=reception.toFloat();
long consigneLong=long(offset_temp*100);
Serial.println(consigneLong);
for (int a=0;a<4;a++){EEPROM.write(OFFSET_T_MEM+a ,consigneLong);consigneLong=consigneLong>>8;}
}
/* Record work position of the accelerometer */
if (httpServer.hasArg("position")){
reception=httpServer.arg("position");
verticale_position=reception.toInt();
if(verticale_position!=1){verticale_position=0;}
int b=verticale_position;
for (int a=0;a<2;a++){EEPROM.write(POSITION_MEM+a ,b);b=b>>8;}
/* Record period of samples */
if (httpServer.hasArg("sample")){
reception=httpServer.arg("sample");
sample=reception.toInt();
EEPROM.write(SAMPLE_MEM,sample);
}
/*Record low filter configuration*/
if (httpServer.hasArg("low_pass")){
reception=httpServer.arg("low_pass");
low_pass=reception.toInt();
EEPROM.write(LOW_PASS_MEM,low_pass);
}
/*Record the max time for a ride*/
if(httpServer.hasArg("duration_ride")){
reception=httpServer.arg("duration_ride");
duration_ride=reception.toInt();
if(duration_ride>300){duration_ride=300;}
int b=duration_ride;
for (int a=0;a<2;a++){EEPROM.write(DURATION_RIDE_MEM+a ,b);b=b>>8;}
}
EEPROM.commit();
step_calibration++;
}
}
if(error_position==0&&httpServer.hasArg("Validate")){ step_calibration++;}
httpServer.send ( 200, "text/html", page_calibration() ); // send web page
}
String page_calibration(){
/* Buttoms validate, restart calibration, warnong prevent */
String buttom1=F("<br><form method='GET'><input type='hidden' name='Validate' id='Validate'/> <input type='submit' value='Validation'/> </form>");
String buttom2=F("<br><form method='GET'><input type='hidden' name='Annulation' id='Annulation'/> <input type='submit' value='Recommencer'/> </form>");
String warning=F("<p><strong>L'appareil n'a pas été positionné correctement, merci de le repositionner. </p>");
String page =F("<!DOCTYPE html> <html lang=fr-FR> <head> <meta charset='utf-8'><title>Coaster accelerometer</title></head>");
page +=F("<body");
if( error_position==1){page +=F(" onload=\"alert('L appareil n a pas été positionné correctement, merci de le repositionner.');\"");}
page +=F(">");
page +=F("<h2> Calibration de l'accélérométre</h2>");
page +=F("<br/>");
if ( step_calibration==0){
page +=F("<p>Etape 1/8 <br> Veuillez installer l'accéléromètre sur une surface de niveau en Z positif <br> Valider lorsque l'accélérométre est en position </P>");
page +=buttom1;
page +=buttom2;
if( error_position==1){page +=warning;}
}
if ( step_calibration==1){
page +=F("<p>Etape 2/8 <br> Veuillez installer l'accéléromètre sur une surface de niveau en Z négatif <br> Valider lorsque l'accélérométre est en position </P>");
page +=buttom1;
page +=buttom2;
if( error_position==1){page +=warning;}
}
if ( step_calibration==2){
page +=F("<p>Etape 3/8 <br> Veuillez installer l'accéléromètre sur une surface de niveau en Y positif <br> Valider lorsque l'accélérométre est en position </P>");
page +=buttom1;
page +=buttom2;
if( error_position==1){page +=warning;}
}
if ( step_calibration==3){
page +=F("<p>Etape 4/8 <br> Veuillez installer l'accéléromètre sur une surface de niveau en Y négatif. <br> Valider lorsque l'accélérométre est en position. </P>");
page +=buttom1;
page +=buttom2;
if( error_position==1){page +=warning;}
}
if ( step_calibration==4){
page +=F("<p>Etape 5/8 <br> Veuillez installer l'accéléromètre sur une surface de niveau en X positif. <br> Valider lorsque l'accélérométre est en position. </P>");
page +=buttom1;
page +=buttom2;
if( error_position==1){page +=warning;}
}
if ( step_calibration==5){
page +=F("<p>Etape 6/8 <br> Veuillez installer l'accéléromètre sur une surface de niveau en X négatif. <br> Valider lorsque l'accélérométre est en position. </P>");
page +=buttom1;
page +=buttom2;
if( error_position==1){page +=warning;}
}
if ( step_calibration==6){
page +=F("<p>Etape 7/8 <br>Merci de vérifier que les valeurs affichées sont cohérentes.<br> Réactualise la page pour mettre à jour les valeurs. </P>");
page +=F("<a href='calibration.html'><button >Actualisation</button></a><p><br></p>");
page +=F("<table border=4 cellspacing=4 cellpadding=4 width=50%><tr><td>Gx</td><td>Gy</td><td>Gz</td></tr><tr><td>");
page +=accX;page +=F("</td><td>");page +=accY;page +=F("</td><td>");page +=accZ;page +=F("</td></tr></table>");
page +=F("<br><form method='GET'><input type='hidden' name='date_calibration' id='date_calibration'/><br><input type='submit' value='Validation' requiered/> </form>");
page +=F("<script type='text/javascript'>");
page +=F("function jour(){ var d = new Date().toJSON().slice(0, 10); return d;}");
page +=F("var elem = document.getElementById('date_calibration');");
page +=F("elem.value = jour();</script>");
page +=buttom2;
}
/* page to set offset temperature and position of box */
if ( step_calibration==7){
offset_temp=0;
page +=F("<p>Etape 8/8 <br>Merci d'indiquer l'offset de température.<br> Ainsi que la postion d'utilisation du Boîtier.<br> 0 pour une utilisation horizontale et 1 Pour une utilisation verticale.<br> La température lu actuelle est de:");page +=temp;page +=F(" °C</P>");
page +=F("<form method='GET'><label>Offset de température</label><input type='number' step='0.01' name='temperature' id='temperature'/><br><br>");
page +=F("<label>Position d'utilisation</label><input type='number' name='position' id='position' value='0' requiered /><br><br>");
page +=F("<label>Durée maximun du cycle en seconde</label><input type='number' name='duration_ride' id='duration_ride' value='120' max='300' requiered /><br><br>");
page +=F("<label>Fréquence d'échantillonnage</label><select name='sample' id='sample'><option value=8 selected>125 Hz</option> <option value=4>250 Hz</option> </select><br><br>");
page +=F("<label>Filtre passe bas en Hz</label><select name='low_pass' id='low_pass'><option value=5 selected>5 Hz</option> <option value=10>10 Hz</option> </select><br><br>");
page +=F("<input type='submit' value='Validation'/> </form>");
}
if ( step_calibration==8){
page +=F("<p>Fin <br>La configuration est maintenant terminée.<br> Merci d'éteindre puis de rallumer l'appareil pour finir l'installation.</P>");
flag=4;
}
page +=F("</body>");
page +=F("<br><footer><a href='http://www.innogreentech.fr'>InnoGreenTech</a><br/><a href='mailto: Cette adresse e-mail est protégée contre les robots spammeurs. Vous devez activer le JavaScript pour la visualiser.'>Contactez moi</a></footer>");
page +=F("</html>");
return page;
}
Portail pour la configuration du wifi de l'accéléromètre.
/* Portal to set wifi connection */
void handleRoot(void){
/* PSSID set*/
if ( httpServer.hasArg("SSID") ) {
Serial.print("SSID: ");
ssid=httpServer.arg("SSID");
Serial.println(ssid);
int c = ssid.length() + 1;
for (int i = 0; i < c; i++) {
EEPROM.write((i+MEM_SSID),ssid[i]);
}
}
if ( httpServer.hasArg("PASSWORD") ) {
Serial.print("password: ");
password=httpServer.arg("PASSWORD");
Serial.println(password);
int c = password.length() + 1;
for (int i = 0; i < c; i++) {
EEPROM.write((i+MEM_PASSWORD),password[i]);
}
EEPROM.commit(); // Record informations
delay (500);
ESP.reset();
}
httpServer.send ( 200, "text/html", page_handleroot() ); // Send web page
}
String page_handleroot(){
String page =F("<!DOCTYPE html> <html lang=fr-FR> <head> <meta charset='utf-8'><title>Coaster accelerometer</title></head>");
page +=F("<body><div id='page'");
page +=F("<section id='configuration'>");
page +=F("<h2> Configuration de la connexion wifi</h2>");
page +=F("<br/>");
page +=F("<br/>");
page +=F("<p>adresse MAC: ");
page +=local_mac;
page +=F("<p/>");
page +=F("<form method='get' accept='' >");
page +=F("<br/>");
page +=F("<br/>");
page += F("<label>SSID: </label><br/>");
page += F("<input type='texte' name='SSID' id='SSID' maxlength='45' value='");page +=ssid; page +=F("' />");
page +=F("<br/>");
page +=F("<br/>");
page += F("<label>Password: <br/></label>");
page += F("<input type='password' name='PASSWORD' id='PASSWORD' maxlength='45' />");
page +=F("<br/>");
page +=F("<br/>");
page += F("<input type='submit' value='Envoi'>");
page += F("</p>");
page += F("</form>");
page += F("</section>");
// page +=F("</div>");
page +=F("<footer><a href='http://www.innogreentech.fr'>InnoGreenTech</a><br/><a href='mailto: Cette adresse e-mail est protégée contre les robots spammeurs. Vous devez activer le JavaScript pour la visualiser.'>Contactez moi</a></footer>");
page +=F("</div></body></html>");
return page;
}
Portail pour formater la mémoire Spiff de l'accéléromètre (lieu où sont enregistrées les données avant d'être transmises)
void format(void){
if(httpServer.hasArg("format"))
{
if(step_format==0){step_format=1;}
if(step_format==2)
{
Serial.println F ("Format Flash memory, it takes several time");
SPIFFS.format();
step_format=3;
}
}
httpServer.send ( 200, "text/html", page_format() ); // send web page
}
String page_format(){
String buttom1=F("<br><form method='GET'><input type='hidden' name='format' id='format'/> <input type='submit' value='Validation'/> </form>");
String page =F("<!DOCTYPE html> <html lang=fr-FR> <head>");
if(step_format==1)
{
page +=F("<META HTTP-EQUIV='Refresh' CONTENT='5;url=format.html?format='>");
}
page +=F("<meta charset='utf-8'>");
page +=F("<title>Format accelerometer</title></head>");
page +=F("<body");
if (step_format==0){page +=F(" onload=\"alert('Attention vous êtes sur le point de formater la mémoire.');\"");}
page +=F(">");
page +=F("<h2> Formatage de la mémoire</h2>");
page +=F("<br/>");
if(step_format==0)
{
page +=F("<p>Valider pour confirmer le formatage </P>");
page +=buttom1;
}
if(step_format==1)
{
page +=F("<p> Le formatage est en cours, merci de patienter quelques instants.<br> Ne débranchez pas l'accélérométre. </P>");
step_format=2;
}
if(step_format==3)
{
page +=F("<p> Le formatage est terminé. </P>");
step_format=0;
}
return page;
}
|